- Анализатор вибрации
- Тяга реактивного двигателя самолета
- Виды приборов
- Механические (рычажные или пружинные) динамометры
- Гидравлический динамометр
- Электрический динамометр
- Одноразовые датчики
- Как не травмироваться при замерах?
- Устройство и принцип работы
- Датчики крутящего момента
- Тензодатчики балочного, консольного и кромочного типов
- Измерение крутящего момента с помощью угловых датчиков вращения
- Способы крепления вибрационных датчиков
- Основные схемы подключения
- Преимущества и недостатки тензодатчиков
- Принцип действия и история изобретения
- Виброметры
- Как развивается этот прибор сегодня?
- Встроенные системы
- Виды силомерных инструментов – как они работают?
- Классификация измерительных приборов
- Принцип работы и сфера применения
Анализатор вибрации
Наиболее часто используются средства измерения, реализуемые на базе вычислительной техники: анализаторы формы, спектральные анализаторы и анализаторы спектра огибающей, структура которых приведена на рисунках , , . Функции анализатора формы () заключаются в измерении амплитуд и фаз отдельных составляющих сигнала и в сравнительном анализе формы отдельных участков сигнала, начало и конец которых определяется углом поворота вала. Подобные анализаторы широко используются для диагностики машин возвратно-поступательного типа и роторов в процессе балансировки. Анализатор спектра () благодаря использованию однотипных элементов позволяет уменьшить время обработки вибрационного сигнала. Введение в схему детектора огибающей дает возможность обнаруживать повреждения подшипников качения и элементов механической системы на ранних стадиях зарождения ().
Рисунок 89 – Структура анализатора формы сигналов вибрации и шума
Рисунок 90 – Структура анализатор спектра сигналов вибрации и шума
Рисунок 91 – Структура анализатора спектра с детектором огибающей
Выпускаются анализаторы, реализующие возможности персональных компьютеров, структура которых приведена на . Подобные средства измерения и анализа сигналов отличаются большими габаритами и используются в лабораторных или стендовых условиях.
Рисунок 92 – Структура входного устройства (AЦП – аналого-цифровой преобразователь)
Развитие конструкции анализаторов вибрации неразрывно связано с развитием компьютерных технологий. Уменьшение габаритов, увеличение объёмов памяти и выполняемых функций – основные направления развития спектроанализаторов.
Тяга реактивного двигателя самолета
Сила тяги двигателя, или его движущая сила, равноценна всем силам давления воздуха на внутреннюю поверхность силовой установки. Тяга некоторых видов реактивных двигателей зависит от скорости и высоты полета. Для вычисления силы тяги реактивного двигателя часто приходится определять тягу на конкретной высоте, у земли, на взлете и во время какой-либо скорости. Для ЖРД сила тяги равноценна произведению массы исходящих газов на скорость, с которой они вылетают из сопла двигателя.
Для ВРД (воздушно-реактивный двигатель) сила тяги измеряется как результат массы газов на разность скоростей, а именно скорости воздушной струи, выходящей из сопла двигателя, и скорости поступающего воздуха в двигатель. Проще говоря, данная скорость уравнивается к скорости полета самолета с реактивным двигателем. Тяга ВРД обычно измеряется в тоннах или килограммах. Важным качественным показателем ВРД является его удельная тяга. Для турбореактивного двигателя – тяга, отнесенная к конкретной единице веса воздуха, который проходит через двигатель в секунду. Этот показатель позволяет понять, насколько высока эффективность эксплуатации воздуха в двигателе для образования тяги. Удельная тяга измеряется в килограммах тяги на 1 кг воздуха, расходуемого за секунду. В некоторых случаях применяется другой показатель, который также называется удельной тягой, показывающей отношение количества топлива, которое расходуется, к силе тяги за секунду. Естественно, что чем выше показатель удельной тяги ВРД, тем меньше поперечный вес и размеры самого двигателя.
Показатель полетной или тяговой мощности – это сила, которая задействует реактивный двигатель при конкретной скорости полета. Как правило, измеряется в лошадиных силах. Величина лобовой тяги говорит о степени конструктивного оптимума реактивного двигателя. Лобовая тяга – это отношение наибольшего показателя площади поперечного сечения к тяге. Лобовая тяга равна тяге, в кг поделенной на площадь в метрах квадратных.
В мировой авиации наиболее ценится тот двигатель, который обладает высокой лобовой тягой.
Чем совершеннее ВРД в конструктивном отношении, тем меньший показатель его удельного веса, а именно общий вес двигателя вместе с приборами и обслуживающими агрегатами, поделенный на величину собственной тяги.
Реактивные двигатели, как и тепловые вообще, отличаются друг от друга не только по мощности, весу, тяге и другим показателям. При оценивании ВРД огромную роль играют параметры, которые зависят от собственной экономичности, а именно от КПД (коэффициент полезного действия). Среди данных показателей главным считается удаленный расход топлива на конкретную единицу тяги. Он выражается в килограммах топлива, которое расходуется за час на образование одного килограмма тяги.
Виды приборов
В зависимости от конструкции и принципа действия, все динамометры подразделяются на механические, гидравлические, электрические. Особой категорией измерителей силы являются одноразовые датчики.
Механические (рычажные или пружинные) динамометры
Единица измерения силы тока
Механические динамометры измеряют силу и ее момент, благодаря таким физическим процессам, как упругое растяжение и сжатие.
Основными разновидностями таких приборов являются:
- Рычажные – в таких приборах упругим телом служит рычаг, деформация которого передается на соединенный с ним датчик или измерительное устройство;
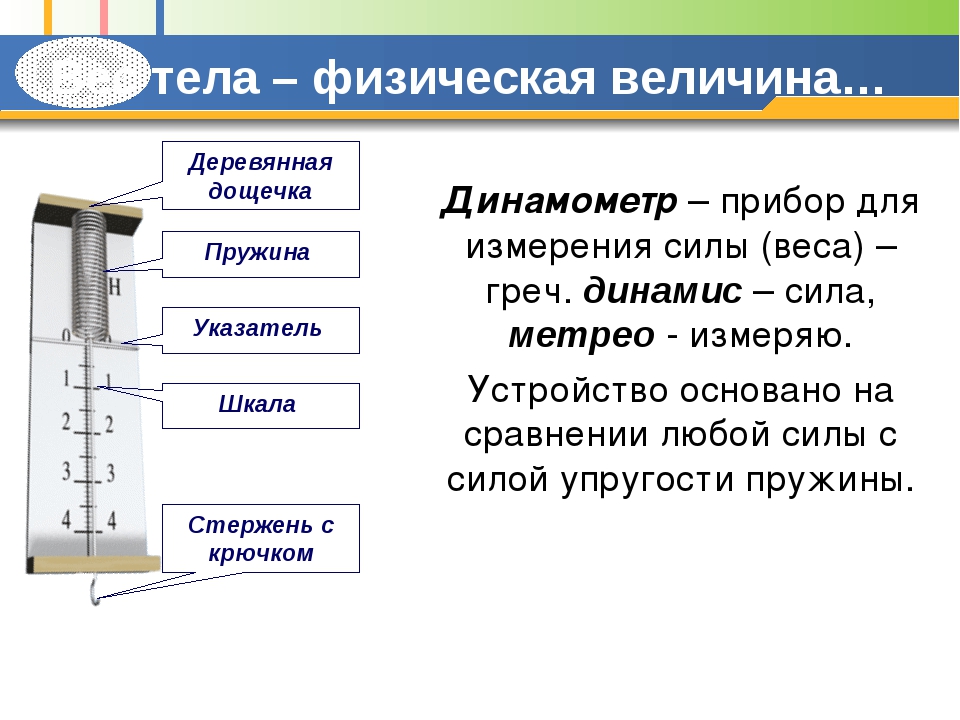
- Механические – это самые простые и распространенные динамометры, состоят из упругой пружины, соединенной со стрелкой, перемещающейся по круглой или вертикальной шкале, с нанесенными делениями, или датчиком, который передает электрический сигнал на электронный блок с электронным табло (монохромным жидкокристаллическим дисплеем).
На заметку. Перед тем, как измерить силу с помощью механического динамометра, являющегося по своей сущности и конструкции обычным безменом, обязательно убеждаются в том, что стрелка на круглой или вертикальной шкале расположена на значении «0». Если стрелка сбилась и показывает при отсутствии нагрузки значение больше нуля, то значит, что упругий элемент претерпел непоправимую деформацию, вызванную приложением к нему нагрузки, значительно превышающей предельно допустимую. Такой прибор уже не будет точным и со временем выйдет из строя.









Гидравлический динамометр
Гидравлический измеритель состоит из:
- Нескольких цилиндров, внутри которых находятся подвижные штоки с поршнями;
- Рычага, закрепленного на верхней части штоков;
- Измеряющего устройства (манометра).
В качестве рабочей жидкости в таких измерителях применяется масло.
Работает такой прибор следующим образом:
- Прикладываемое к рычагу усилие через штоки и поршни воздействует на находящуюся в цилиндрах жидкость;
- Вытесняемая жидкость по трубкам поступает к манометру;
- Манометр измеряет давление поступившей из цилиндров жидкости и отображает его на круглой аналоговой стрелочной шкале или жидкокристаллическом монохромном цифровом дисплее в виде определённого значения воздействующего на рычаг усилия.
Такие приборы позволяют определять значение силы с большей точностью, чем механические аналоги. Однако, по сравнению с последними, такие динамометры характеризуются более высокой ценой, дорогостоящим ремонтом и обслуживанием, неточностью при разгерметизации цилиндров и появлении протечек рабочей жидкости.
Электрический динамометр
Электрические динамометры состоят из:
- Упругого элемента, соединённого с реагирующим на его деформацию датчиком индуктивного, емкостного, пьезоэлектрического, вибрационно-частотного или тензорезисторного типа;
- Усилителя поступающего от датчика электрического сигнала;
- Электронного блока, оборудованного дисплеем.
Принцип действия такого прибора достаточно прост:
- Усилие, прилагаемое к упругому телу, регистрируется датчиком;
- Датчик посылает электрический сигнал на усилитель, который, в свою очередь, передает его на электронный блок;
- Электронный блок со встроенной микросхемой переводит полученный от усилителя сигнал в графическое изображение значения силы на дисплее.
На заметку. Так как такие электрические приборы, в отличие от большинства механических и гидравлических, снабжены электронным блоком и дисплеем, перед использованием их необходимо включать специальной кнопкой. Питание таких приборов осуществляется от встроенных аккумуляторных батарей. Некоторые модели можно для обеспечения питанием подключать к сети, имеющей напряжение 220 В. Устройства, имеющие разряженное питание или не подключённые к сети, включаться и работать не будут.
Одноразовые датчики
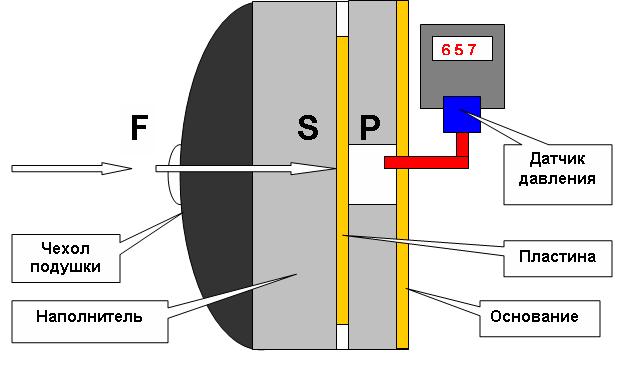
Такие датчики, в отличие от описанных выше аналогов, используются для измерения разрушительных нагрузок, имеющих огромную мощность: очень сильного удара, мощного взрыва. Однако перед тем, как потерять целостность и полностью выйти из строя, они достаточно точно измеряют и передают на расположенный на безопасном расстоянии электронный блок данные о силе, разрушившей их.
Как не травмироваться при замерах?
Чтобы перестраховаться, если имеются сомнения, лучше ознакомиться с инструкцией к электроприбору и проверить верность подсоединения
Выполняя замеры, важно помнить о мерах защиты при работе с электротоком. Травмирование может случиться даже при работе с незначительной токовой мощности аппаратами
Особенно в условиях с высокой влажностью. Необходимо работать в прорезиненной спецодежде.
Для исследования СТ, ученые придумали измеряющие электроприборы. Из-за незначительного внутреннего сопротивления, эти измерители не оказывают влияние на параметры электротока в измеряемой токовой цепи. Приборы активно применяются на промобъектах и дома.
Устройство и принцип работы
Основу тензодатчика составляет тензорезистор, оснащенный специальными контактами, закрепленными на передней части измерительной панели. В процессе измерения чувствительные контакты панели соприкасаются с объектом. Происходит их деформация, которая измеряется и преобразуется в электрический сигнал, передаваемый на элементы обработки и отображения измеряемой величины тензометрического датчика.
В зависимости от сферы функционального использования датчики различаются как по типам, так и по видам измеряемых величин. Важным фактором является требуемая точность измерения. Например, тензодатчик грузовых весов на выезде с хлебозавода совершенно не подойдет к электронным аптекарским весам, где важна каждая сотая часть грамма.
Рассмотрим более предметно виды и типы современных тензометрических датчиков.
Датчики крутящего момента
Датчики крутящего момента предназначены для измерения крутящего момента на вращающихся частях таких систем, как коленвал двигателя или рулевой колонки. Тензодатчики крутящего момента могут определять как статический, так и динамический момент контактным либо бесконтакным (телеметрическим) способом.
Тензодатчики балочного, консольного и кромочного типов
Эти типы датчиков изготавливают обычно на основе параллелограммной конструкции со встроенным элементом изгиба для высокой чувствительности и линейности измерений. Тензорезисторы в них закрепляются на чувствительных участках упругого элемента датчика и соединяются по схеме полного моста.








Конструктивно балочный тензодатчик имеет специальные отверстия для неравномерного распределения нагрузки и выявления деформаций сжатия и растяжения. Для получения максимального эффекта тензорезисторы по специальным меткам строго ориентируют на поверхности балки в ее самом тонком месте. Высокоточные и надежные датчики этого типа используют для создания многодатчиковых измерительных систем в платформенных или бункерных весах. Нашли они свое применение и в весовых дозаторах, фасовщиках сыпучих и жидких продуктов, измерителях натяжения тросов и других измерителях силовых нагрузок.
Измерение крутящего момента с помощью угловых датчиков вращения
Существует другой способ. Он не новый, но, похоже, был успешно забыт. Впервые такой вариант был применен в 50-х годах прошлого века для измерения момента вращения в двигателях внутреннего сгорания — наиболее наглядно в турбореактивных двигателях тяжелых грузовых самолетов Hercules и C-130. Техники измеряли величину скручивания и, следовательно, момент вращения с помощью измерения величины фазового сдвига между двумя многопериодными резольверами, установленными и отъюстированными на валу. Термин «многопериодный» относится к выходу резольвера — так двухпериодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 180°; 36ти-периодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 10°.
При вращении вала каждый из резольверов выдает два сигнала: первый изменяется по синусоидальному закону, второй — по косинусоидальному. Для упрощения, на рисунке 1, приведенном ниже, показаны только два демодулированных синусоидальных сигнала.
Рисунок 1 — Измерение момента вращения с использованием многопериодных резольверов.
При приложении нулевого момента сигналы с обоих резольверов одинаковы и не имеют сдвига фаз. В случае, когда реальный момент приложен к валу сигнал одного резольвера имеет фазовый сдвиг относительно сигнала другого резольвера. Величина этого фазового сдвига прямо пропорциональна приложенному моменту. Используя многопериодные резольверы с большим числом циклов (например, 128), возможно даже при небольшой величине скручивания получить отклик в виде сравнительно большой величины фазового сдвига. Другими словами, эта методика достаточно прецизионна, чтобы измерять скручивание вала не только на величины менее 1°, но даже и на уровнях менее 0,1°. Из чего следует, что вал, на котором производится измерение, не обязательно должен быть длинным. Действительно, длина вала, необходимого для успешных измерений, может составлять менее 25 мм. Этого можно достигнуть, используя заведомо гибкий вал или располагая резольверы концентрически — один внутри другого — и соединяя внешние и внутренние части вала с применением пружины повышенной крутильной жесткости.
В отличие от тензометрических датчиков, резольверы известны своей надежностью, устойчивостью к внешним воздействиям и точностью, они зачастую используются в космической, оборонной и нефтегазовой технике, где требуются высокие точности и устойчивость к жестким условиям эксплуатации. Поскольку резольвер является бесконтактным измерительным устройством, также исключается необходимость применения токосъемников или оборудования радиочастотной передачи данных.
Итак, почему же эта техника измерений стала немодной? Вероятно, одна из причин в том, что и сами резольверы утратили свою популярность. Плоскопараллельные и плоские с большим полым валом резольверы, идеальные для использования при измерениях крутящего момента, являются откровенно дорогостоящими. Более того, сочетание резольверных двигателей с управляющей электроникой может быть очень сложным. Поскольку в наше время инженеры более привычны к цифровой электронике, они весьма неохотно соглашаются иметь дело и с самой аналоговой электроникой и, тем более, с измерениями фазовых сдвигов аналоговых переменных сигналов.
Способы крепления вибрационных датчиков
Возможны следующие способы крепления вибрационных датчиков ():
- при помощи шпильки;
- клеевые соединения, включая крепление при помощи пчелиного воска;
- использование промежуточных элементов;
- при помощи магнитов;
- при помощи щупа.
Рисунок 82 – Способы крепления вибрационных датчиков
Крепление при помощи шпильки на гладкой плоской поверхности является предпочтительным. Место проведения измерения предварительно подготавливается (). Сверлится отверстие, нарезается резьба, шлифуется поверхность. При этом соблюдаются следующие требования:
- глубина резьбового отверстия должна быть достаточной, чтобы шпилька не упиралась в дно отверстия в основании датчика;
- шероховатость поверхности не более 1,6…0,25 Rz;
- неперпендикулярность оси резьбового соединения к плоскости крепления преобразователя не более 0,02%;
- неплоскостность поверхности крепления 0,01%;
- крутящий момент при креплении датчика на шпильку М4…М8 1,7…2 Нм.
Рисунок 83 – Требования к месту установки датчика при помощи шпильки
Поверхность объекта должна быть ровной и чистой. На рабочую поверхность датчика наносится слой пластичной смазки, что увеличивает жёсткость механического соединения датчика и объекта измерений и создает хороший контакт поверхностей.
На показана амплитудно-частотная характеристика пьезодатчика, закрепленного стальной шпилькой на гладкой поверхности объекта. В этом случае резонансная частота пьезодатчика практически совпадает с резонансной частотой, полученной при калибровке производителем (примерно 33 кГц).
Недостатки: большие затраты времени на установку датчика и необходимость проведения слесарных работ.
Альтернативным методом крепления пьезодатчиков является крепление на тонком слое пчелиного воска, при помощи клея, цемента и другие. Резонансная частота уменьшается незначительно (). Этот способ крепления применим при комнатной температуре поверхности объекта и малой амплитуде колебаний.
Недостатками этого метода крепления являются размягчение воска или клея с ростом температуры (допустимая температура +35…40 °С) и ненадежность крепления массивных датчиков, особенно в направлении измерения, отличном от вертикального. Крепление датчика пчелиным воском на гладкой чистой поверхности при измерении вибрации в вертикальном направлении можно считать допустимым для датчиков массой не более 20 г при амплитудах виброускорения до 100 м/с2.






Использование промежуточных элементов – пластин, дисков приводит к искажению воспринимаемого сигнала на высоких из-за механической фильтрации и снижению резонансной частоты из-за повышенной податливости системы.
В тех случаях, когда необходимо обеспечить прочное крепление акселерометра без нарушения поверхности объекта резьбовыми отверстиями, используются специальные шпильки, закреплённые на плоском диске (промежуточные элементы) прикрепляемые твёрдым клеем или цементом. В качестве склеивающих материалов рекомендуются эпоксидные смолы и цианакриловые клеи. Изолированная шпилька и слюдяная шайба используются там, где необходима электрическая изоляция акселерометра относительно объекта.
Наиболее широкое распространение получил способ крепления датчиков на гладкой поверхности объекта с помощью постоянного магнита. При этом статическая сила сцепления магнита с измерительной поверхностью во многом влияет на диапазон измерений. Это определяет необходимость использования неодимовых магнитов с усилием 30…50 Н. Требования к обработке поверхности те же, что и для соединения при помощи шпильки. Крепление при помощи магнита () сокращает измеряемый частотный диапазон до 5000 Гц. Резонансная частота в этом случае уменьшается примерно до 7… 15 кГц и зависит от типа магнита.
Рисунок 86 – Амплитудно-частотная характеристика вибрационного датчика при креплении с помощью магнита
Измерение вибрации с помощью щупа, снижает верхний частотный диапазон () до 1000 Гц. Угол между измерительной осью вибродатчика и направлением измерения на должен превышать 25°.
Основные схемы подключения
Рассмотрим это на примере подключения тензометрических датчиков к бытовым или промышленным весам. Стандартный тензодатчик для весов имеет четыре разноцветных провода: два входа — питание (+Ex, -Ex), два других — измерительные выходы (+Sig, -Sig). Встречаются также варианты с пятью проводами, где дополнительный провод служит в качестве экрана для всех остальных. Суть работы весового измерительного датчика балочного типа довольно проста. На входы подается питание, а с выходов снимается напряжение. Величина напряжения зависит от приложенной нагрузки на измерительный датчик.
Если длина проводов от весового тензодатчика до блока АЦП значительна, то сопротивление самих проводов будет влиять на показание весов. В этом случае целесообразно добавить цепь обратной связи, которая компенсирует падение напряжения путем корректировки погрешности от сопротивления проводов, вносимую в измерительную цепь. В этом случае схема подключения будет иметь три пары проводов: питания, измерения и компенсации потерь.
Преимущества и недостатки тензодатчиков
Широкое применение тензодатчики получили благодаря своим свойствам:
- возможности монолитного соединения датчика деформации с исследуемой деталью;
- малой толщине измерительного элемента, что обеспечивает высокую точность измерения с погрешностью 1-3 %;
- удобстве крепления, как на плоских, так и на криволинейных поверхностях;
- возможности измерения динамических деформаций, меняющихся с частотой до 50000 Гц;
- возможности проведения измерений в сложных условиях окружающей среды в температурном интервале от -240 до +1100˚С;
- возможности измерений параметров одновременно во многих точках деталей;
- возможности измерения деформации объектов, расположенных на больших расстояниях от тензометрических систем;
- возможностью измерения деформаций в движущихся (крутящихся) деталях.
Из недостатков следует отметить:
- влияние метеоусловий (температуры и влажности) на чувствительность датчиков;
- незначительные изменения сопротивления измерительных элементов (около 1%) требует применение усилителей сигналов.
- при работе тензодатчиков в условиях высокотемпературной или агрессивной среды необходимы специальные меры их защиты.
Принцип действия и история изобретения
Первым устройством для измерения силы были изобретенные в первой половине XVIII века весы. Самый простой пружинный измеритель был сконструирован только спустя 100 лет в 1830 году английским ученым Ричардом Солтером. Вслед за измерителями механическими в первой половине XX были изобретены гидравлические приборы. Более совершенные и точные электрические динамометры появились уже во время бурного развития полупроводниковых приборов во второй половине XX века.
ИС 10 – прибор для измерения сопротивления заземления
Самый простой измеритель силы имеет следующее принципиальное устройство:
- Упругий силовой элемент – упругое тело, на которое напрямую воздействует измеряемая сила. Таким элементом могут быть стальная, обладающая высокой упругостью пружина, вода, различные датчики.
- Измеряющее устройство (аналоговое или цифровое) – жидкокристаллический дисплей, круглый градуированный циферблат или шкала, по которым перемещается подвижная стрелка.
Работает самый простой пружинный динамометр следующим образом:
- На упругий силовой элемент – пружину воздействует измеряемая сила, вызывая его деформацию (растяжение).
- Растягивающаяся пружина приводит в движение закрепленную на ней стрелку, которая, передвигаясь по вертикальной шкале, регистрирует величину приложенного к концу упругого элемента усилия.
- После снятия усилия пружина сжимается, стрелка возвращается в исходное положение, соответствующее нулевому значению.
На заметку. Основой функционирования любого динамометра является закон Гука, гласящий, что величина возникающей в упругом теле деформации прямо пропорционально вызвавшему ее усилию.
Точность и корректность получаемых с помощью такого прибора данных гарантированы только при условии применения в его конструкции упругого тела, деформирующегося под воздействием внешней силы и принимающего после его прекращения исходное состояние.
К таким телам относятся всевозможные пружины, а также заключенные в цилиндры жидкости.
Виброметры
Приведенная на рисунке 88 блок-схема иллюстрирует конструкцию и принцип действия современного виброметра. Акселерометр соединяется с усилителем заряда, образующим входной каскад прибора. Усилитель заряда во входном каскаде исключает необходимость применения внешнего предусилителя и даёт возможность соединения акселерометра и виброметра длинным кабелем без заметной потери чувствительности системы.
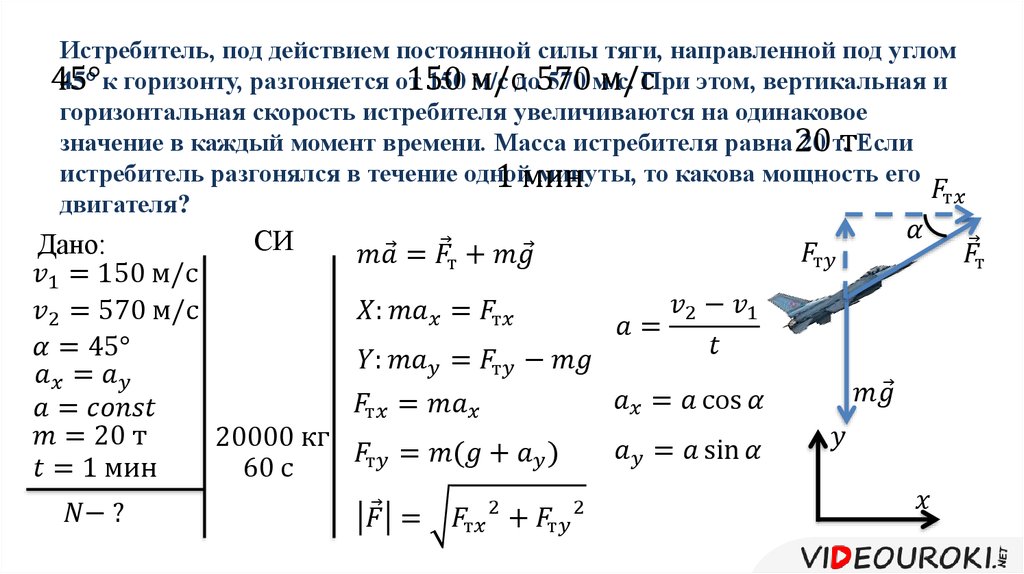


Рисунок 88 – Блок-схема виброметра
Каскад электронных интеграторов обеспечивает измерение виброскорости и виброперещения. Фильтры верхних и нижних частот настраивают согласно требованиям к ширине анализируемой полосы частот, рабочему частотному диапазону используемого акселерометра. Фильтры позволяют эффективно подавляют помехи, обусловленные низко- и высокочастотными шумами. Усилительный каскад обеспечивает необходимое усиление сигнала.
Виброметр позволяет измерять среднеквадратичное, пиковое значение или размах колебаний измеряемого сигнала. В конструкции может быть предусмотрено запоминающее устройство. Запоминающее устройство эффективно при измерении механических ударов и переходных процессов. После преобразования в каскаде линейно-логарифмического преобразователя измеряемый сигнал поступает на измерительный прибор.
Вместе с виброметром можно использовать внешние фильтры, обеспечи-вающие частотный анализ исследуемых механических колебаний. Виброметр снабжается выходами переменного и постоянного напряжений. Это позволяет подключать осциллографы, измерительные магнитофоны и регистрирующие приборы.
Динамический диапазон определяет возможность виброизмерительной аппаратуры при измерении амплитуды вибрационного сигнала сохранять линейную связь между входом и выходом. Выражается в дБ или параметрах вибрации.
Динамический диапазон сверху ограничен максимальным значением входного заряда, снизу уровнем собственных шумов усилителя заряда. Динамический диапазон зависит от коэффициента преобразования акселерометра.
Величина отношения сигнал/шум (Кш) регламентируется ГОСТ 30296-95:
- для диапазона частот 10 Гц Кш = 2,51;
- для диапазона частот от 10 Гц и выше Кш = 3,162.
Динамический диапазон вибродиагностической аппаратуры лежит в пределах 60…100 дБ, иногда выше.
Как развивается этот прибор сегодня?
Современная промышленность не останавливается на достигнутом. Появления таких приборов в жизни людей позволили создавать много полезных устройств, которые облегчают жизнь. Производители в своей работе используют новые открытия, новые технологии. Постепенно старые модели уходят из обихода и появляются новые, более удобные. Так, на сегодняшний день вместо привычных механических все больше используются электронные силомеры. Они отличаются составляющими элементами.
Устройство электронных приборов содержит тензодатчик, то есть силовой датчик, измерительные индикаторы и соединительные провода или радиоканалы. Принцип работы такого вида прибора основан на измерении деформаций тензометрическим датчиком за счет воздействий прикладываемых сил. В процессе работы образуется электрический сигнал, полностью прямо пропорциональный сообщенной деформации. Полученные показатели и являются силовыми величинами.
В настоящее время именно такими приборами пользуются во многих промышленных отраслях для поверок испытательных машин, либо стендов. Поэтому производители стараются выпускать чаще такие приборы, предназначение которых – определять не только изменяющиеся, но и статические силы растяжений и сжатий. Последняя модель измерительного прибора СИУ2 и СИУ работает именно с помощью инструмента сжатий. Их применение наиболее востребовано на предприятиях, где необходимо проводить проверки испытательных конструкций.
Встроенные системы
Принципиальная схема встроенной системы вибрационного контроля включает: датчики, соединительные устройства, персональный компьютер, совместно с программным обеспечением выполняющий функции управления переключением датчиков, сбора и анализа информации ().
Рисунок 93 – Принципиальная схема встроенной системы вибрационного контроля
Конфигурация измерительных блоков включает: датчики, измерительные или измерительно-сигнализирующие блоки и средства коммутации. Дополнительно измерительные блоки могут иметь контрольные выходы для подключения переносных приборов. Измерительные блоки являются независимыми друг от друга устройствами. Каждый блок индивидуально программируется. Измерительно-сигнализирующие блоки осуществляют сравнение измеренных значений с запрограммированными.
Программное обеспечение, используемое системой, сохраняет, визуализирует и оценивает результаты измерений. Осуществляет связь с переносными приборами-сборщиками информации. Управляет стационарной системой мониторинга, позволяет организовать базы данных по оборудованию, по времени измерений, работ по смазке, работ по ремонту и техническому обслуживанию. Обеспечивает графическое представление информации о состоянии оборудования.







Виды силомерных инструментов – как они работают?
Механические инструменты такого вида делятся на пружинные и рычажные.
- Ручной пружинный динамометр устроен так, что сила передается пружинам, они, в свою очередь, будут сжиматься и растягиваться, а направление уже будут создавать приложенные силы. После сжатий и растягиваний на приборе будут видны показатели. Вот они и будут основными величинами, именно их он и регистрирует.
- В рычажных моделях деформация образуется с помощью установленного рычага.
Принцип работы гидравлического прибора основан на вымещениях измеряемой силой жидкостей из цилиндров. В конструкции имеется специальное цилиндрическое устройство, заполненное жидкостью. Когда на приспособлении создается усилие, то жидкость подступает к трубке и затем к аппарату, который записывает и регистрирует показатели. Таким нехитрым законом физики получилось создать довольно точный прибор.
А что же что измеряется динамометром электрического типа? Приборы такого вида состоят из датчиков, с их помощью преобразуется деформация от воздействий сил в электрические сигналы. Также имеются и дополнительные датчики, они усиливают и записывают электрические сигналы от первых датчиков. Если необходимо преобразовывать силы или силовые моменты в деформацию, то нужно пользоваться индуктивными, пьезоэлектрическими, тензорезисторными и вибрационно-частотными датчиками сопротивлений.
Когда будет создаваться силовой момент, то датчик тут же будет деформироваться, а токи моста сопротивлений будут меняться. У электрических сигналов силы всегда пропорциональны деформациям элементов, а значит, и силам воздействий. При помощи второго датчика будет усиливаться сигнал, а показатели будут записываться для следующей обработки.
Принцип работы тормозного измерителя силы основан на поглощении мощностей обследуемых агрегатов. Приборы такого типа отличаются конструктивными решениями, то есть могут быть установлены в тормоза разных видов. Это могут быть гидравлические тормоза Прони или электромагнитные, а с помощью двигателей определяется мощность. Во время работы происходит воздействие на вал, и вращательными усилиями или крутящими моментами происходит измерение прибором. Наиболее часто измеряется скорость вращений валов при помощи тахометра.
В приборах трансмиссионного типа установлено устройство – тензодатчик. Он тесно связан с приводным валом, с его же помощью происходит и измерение деформаций кручений. Деформации меняют электрические сопротивления на тензодатчике. Наиболее часто такими приборами пользуются на судовых двигателях.
Классификация измерительных приборов
Принято деление амперметров на две большие группы: цифровые и аналоговые модели. Последние имеют уникальную собственную градацию:
- Электродинамическая модель. Активно реагирует на взаимодействия токового поля, протекающего по катушкам. Одна из катушек может свободно двигаться, а вторая неподвижно закреплена. Высокий спрос на изделие вызывается низкой ценой и отличными показателями работы. Часто его можно встретить в научных лабораториях.
- Ферродинамическая. Обладает максимальной точностью и эффективностью использования. Устройство с таким механизмом не реагирует на посторонние источники магнитных полей. Помимо ферромагнитного замкнутого провода, в корпусе закрепляется сердечник и катушка. Модели этого вида немного дороже аналогов.
- Электромагнитный тип. Наиболее простое по содержанию устройство, не оснащено плавающей обмоткой с сердечником. В зависимости от мощности тока сердечник, зафиксированный со стрелкой, двигается в сторону, чётко указывая на цифровое отображение измерения.
- Магнитоэлектрический механизм. Был изобретён одним из первых. Принцип действия основывается на измерении уровня взаимодействия между магнитным полем и закреплённой неподвижно катушкой. Этот тип отличается минимальным потреблением мощности, что позволяет обеспечить минимальный коэффициент отклонения и достаточный уровень чувствительности. Шкала деления равномерна, между каждой из отметок сохраняется одинаковое расстояние.
Принцип работы и сфера применения
Уникальное строение прибора позволяет ему функционировать по простой схеме коммуникации. Вместе с постоянным магнитом на оси кронштейна располагается стальной якорь и закреплённая на нём стрелка. При воздействии на якорь постоянные магниты передают ему свои свойства. При этом позиция якоря располагается вдоль силовой линии, проходящей возле магнита.
Подобная позиция якоря задаёт нулевую отметку стрелки по градуированной шкале. Магнитный поток возникает при протекании тока от генератора или похожего источника по шине. Сохраняется прямой угол между силовыми линиями магнита и точкой расположения якоря. Силовой уровень взаимодействия потоков будет зависеть от величины и направления электрического тока, протекающего по шине. Именно на этот показатель отклоняется от нуля стрелка прибора.
Агрегат широко применяется в следующих отраслях:
- радиоэлектроника;
- электротехника;
- энергетическая ветвь промышленности;
- строительство;
- транспортные сети;
- научно-исследовательские лаборатории.