- Использование асинхронных двигателей в однофазной цепи
- Как действуют асинхронные электромоторы
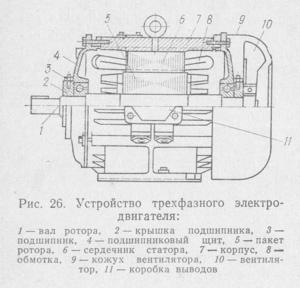
- Конструкция асинхронного двигателя
- Принцип действия электродвигателей
- Универсальное коллекторное оборудование
- Принцип действия асинхронного двигателя
- Основные типы электродвигателей
- Особенности работы электромоторов постоянного тока
- Краткая история создания
- Работа трехфазного асинхронного двигателя
- Синхронный принцип работы электродвигателя
- Асинхронные двигатели, особенности пуска
Использование асинхронных двигателей в однофазной цепи
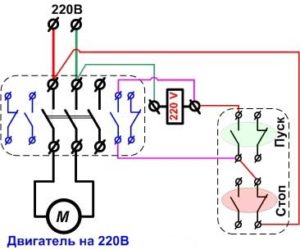
Отличительной чертой при запуске такого мотора является ручное включение. Это вызвано наличием пусковой обмотки или фазосдвигающей цепи. В отличие от трёхфазного собрата, который запускается автоматически, за счёт сдвига трёх фаз, однофазному нужен начальный толчок.
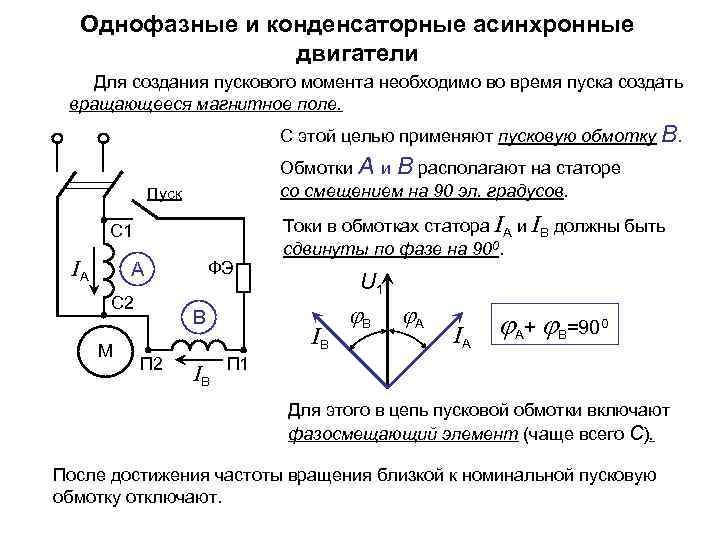 Схема включения однофазного мотора
Схема включения однофазного мотора
Запуск достигается кратковременным включением дополнительной (пусковой) обмотки, которая включается через пусковое реле с термопарой или кнопкой ПНВС -12(220В 10А).
К сведению. Можно включить и трёхфазный асинхронный мотор в сеть 220 В. При этом обмотки соединяются в «звезду» или «треугольник». Концы двух обмоток подсоединяют к сети, конец третьей – через последовательно присоединённый пусковой конденсатор большой ёмкости кратковременно (во избежание сгорания) подключают к одной из них.
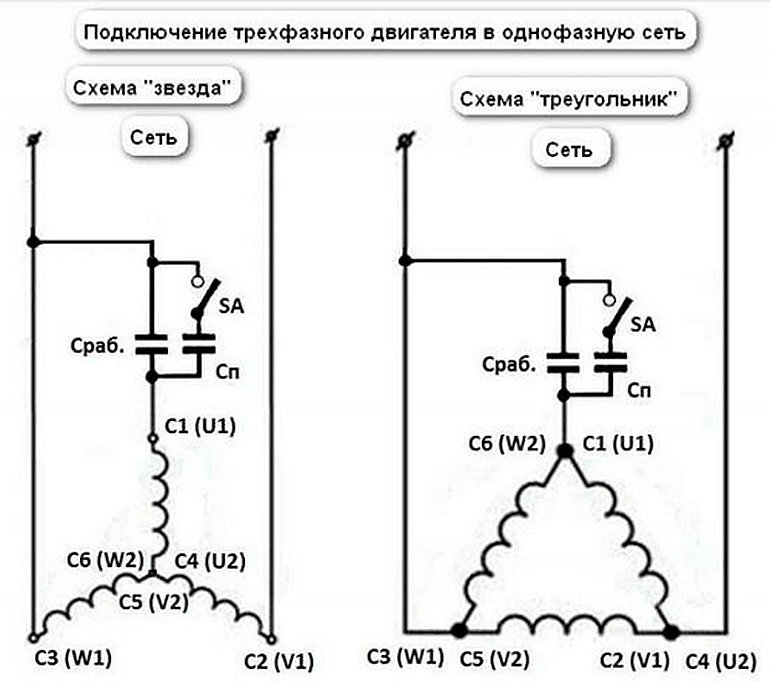 Схема включения трёхфазного мотора в однофазную сеть
Схема включения трёхфазного мотора в однофазную сеть
Чтобы повысить мощность электродвигателя, формула которого включает в себя cosϕ, коэффициент мощности, следовательно, и коэффициент полезного действия (КПД), в цепь включают рабочую ёмкость. Она включена постоянно. Так, трёхфазный двигатель на 2 квт, при включении подобным образом, будет отдавать только 45-60% заявленной мощности. Мощность любого трехфазного двигателя по формуле вычислить несложно.
Как действуют асинхронные электромоторы
Среди всех агрегатов переменного тока, чаще всего во многих сферах используются асинхронные двигатели трехфазного тока. Общий принцип работы асинхронного мотора очень простой и будет рассмотрен ниже. Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
Агрегаты асинхронного типа также, как и другие, выпускаются и используются для трансформации переменного тока в механическую работу вала. Если объяснять по-простому, для чайников, понятие асинхронный возникло из-за разницы, возникающей между частотами, с которыми вращаются магнитные поля статоров и роторов. Частота у статора во всех случаях превышает частоту вращения ротора.
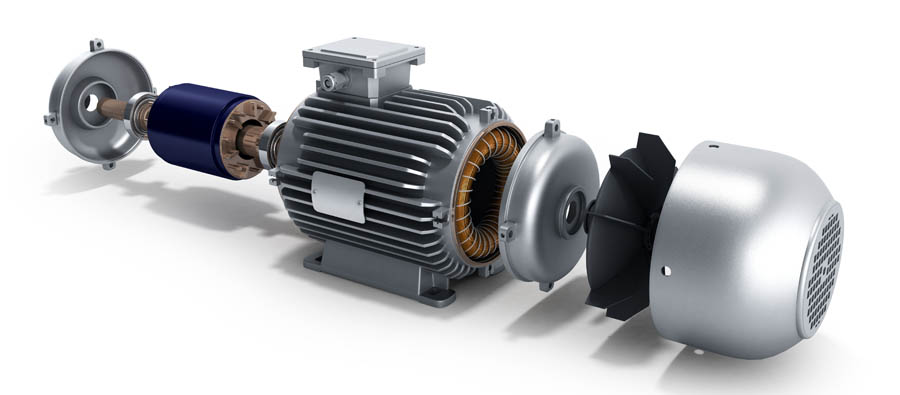
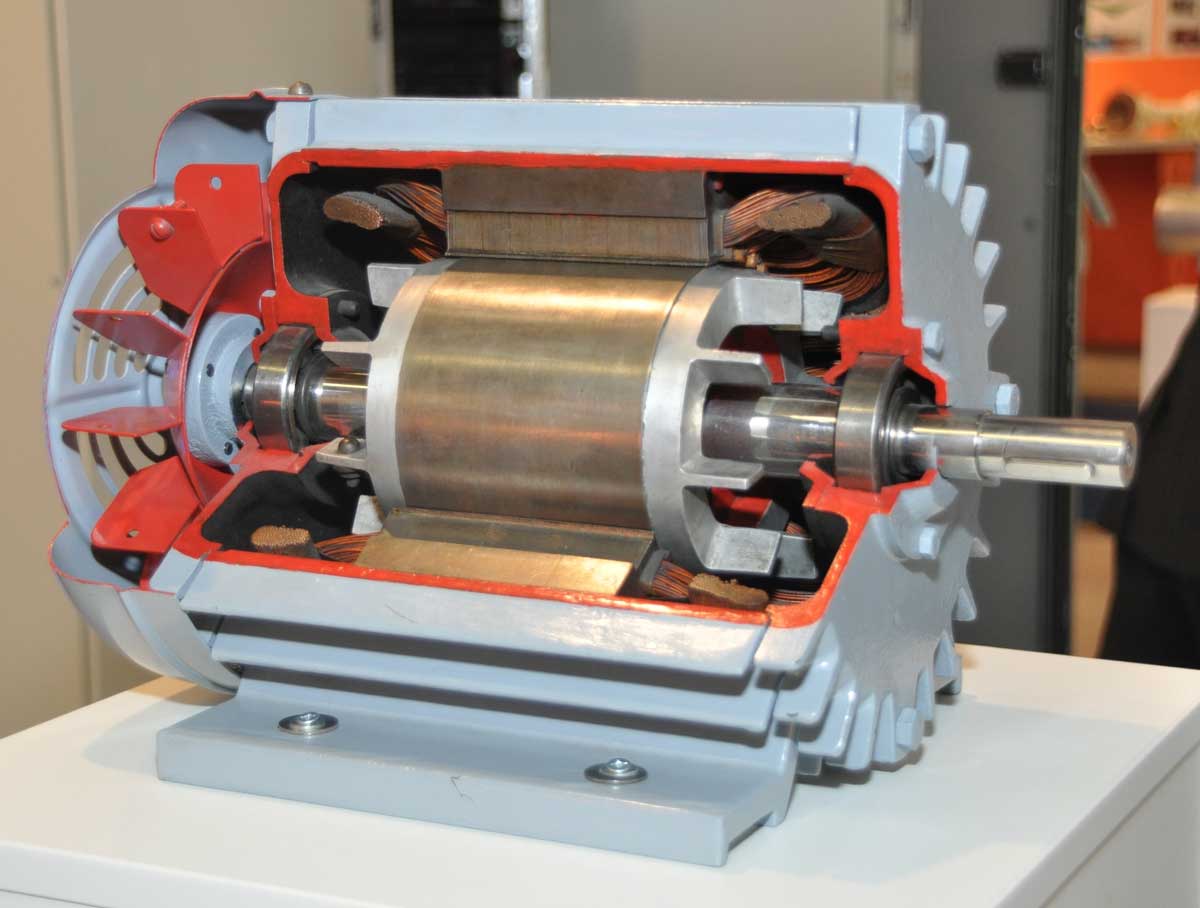
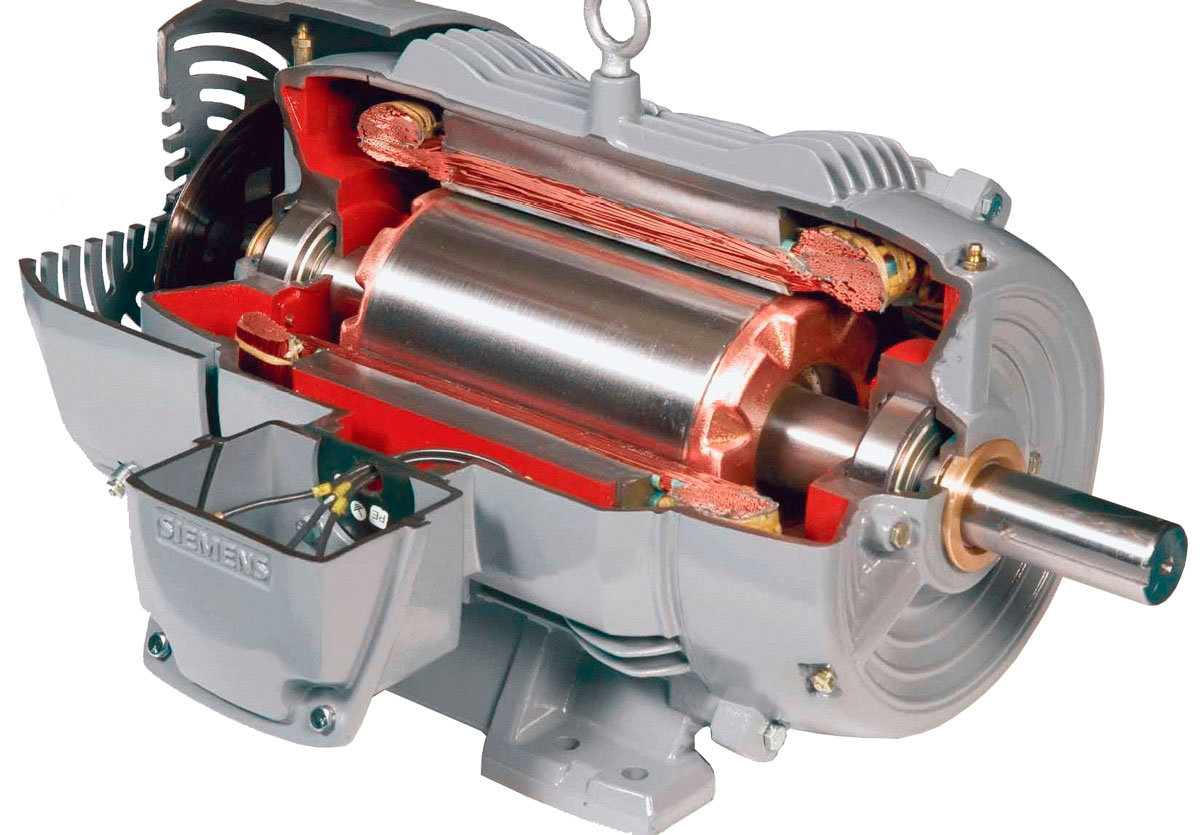
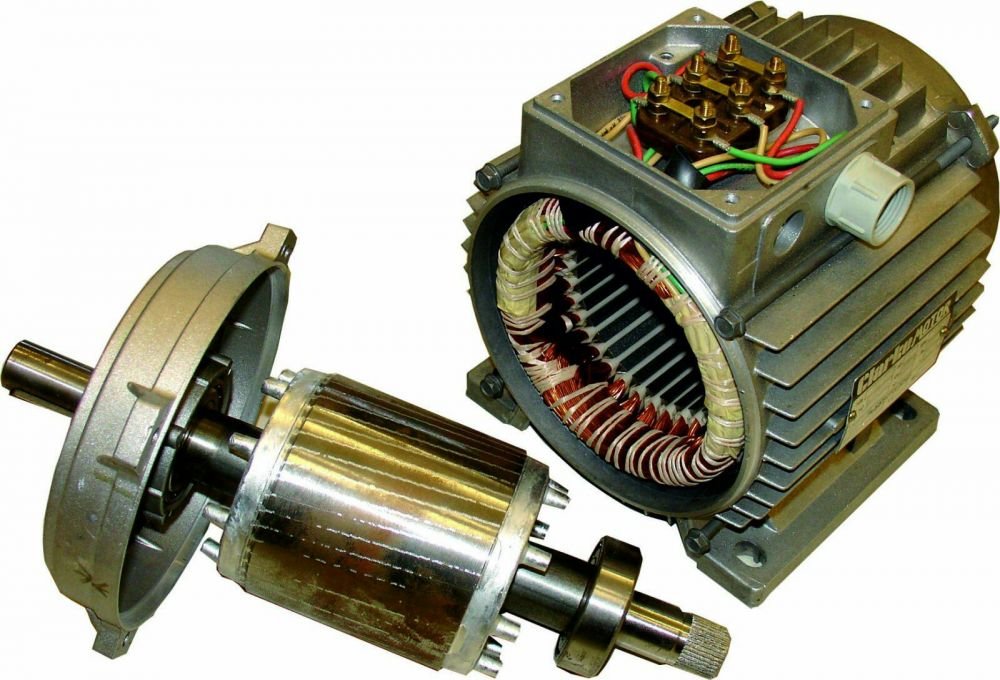
Конструкция асинхронного двигателя
В конструкцию асинхронного электродвигателя входят две основные детали – статор и ротор.
Для изготовления статора используются стальные листы, а сам он имеет форму цилиндра. В пазы конструкции укладываются обмотки из медных проводников. Их оси сдвинуты в пространстве относительно друг друга на 120 градусов. Соединение между собой концов каждой обмотки осуществляется по разным вариантам – в виде звезды или треугольником.
Роторные части асинхронных моторов изготавливаются в двух вариантах. В первом случае это изделия с короткозамкнутым ротором, собираемым в форме сердечника из стальных пластинок. В его пазы заливается алюминий в расплавленном виде, что приводит к образованию стержней, коротко замкнутых с торцевыми кольцами. В агрегатах повышенной мощности алюминиевый расплав по технологии заменяется медью.
Второй вариант представляет собой фазный ротор, имеющий такую же трехфазную обмотку, аналогичную обмотке у статора. Как правило, соединение обмоток в этом случае осуществляется звездой, а их свободные концы соединяются с контактными кольцами. Эти же кольца соединяются со щетками, обеспечивающими использование добавочного резистора. Данный элемент уменьшает слишком высокое значение пусковых токов.







Когда к обмотке трехфазного статора подается напряжение, во всех фазах возникает магнитный поток, изменяющийся с такой же частотой, как и в поступающем напряжении. У всех магнитных потоков имеется сдвиг на 120 градусов по отношению друг к другу. В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС.
Образовавшийся ток начинает взаимодействовать с магнитным потоком статора, что, в результате, приводит к возникновению пускового момента электромотора. То есть, ротор устремляется к повороту в том же самом направлении, в каком осуществляется вращение магнитного поля статора. После того как пусковой момент превысит тормозной момент ротора, вал двигателя начнет вращаться.

Тяговый электродвигатель: назначение и применение

Виды электродвигателей: устройство, принцип работы
Подключение асинхронного электродвигателя
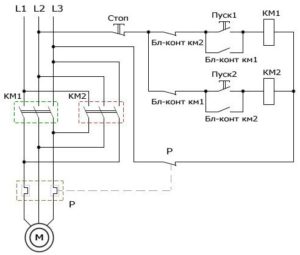
Схема реверса электродвигателя с магнитным пускателем

Крановые электродвигатели

Как проверить электродвигатель: этапы проверки и выяснение неисправностей
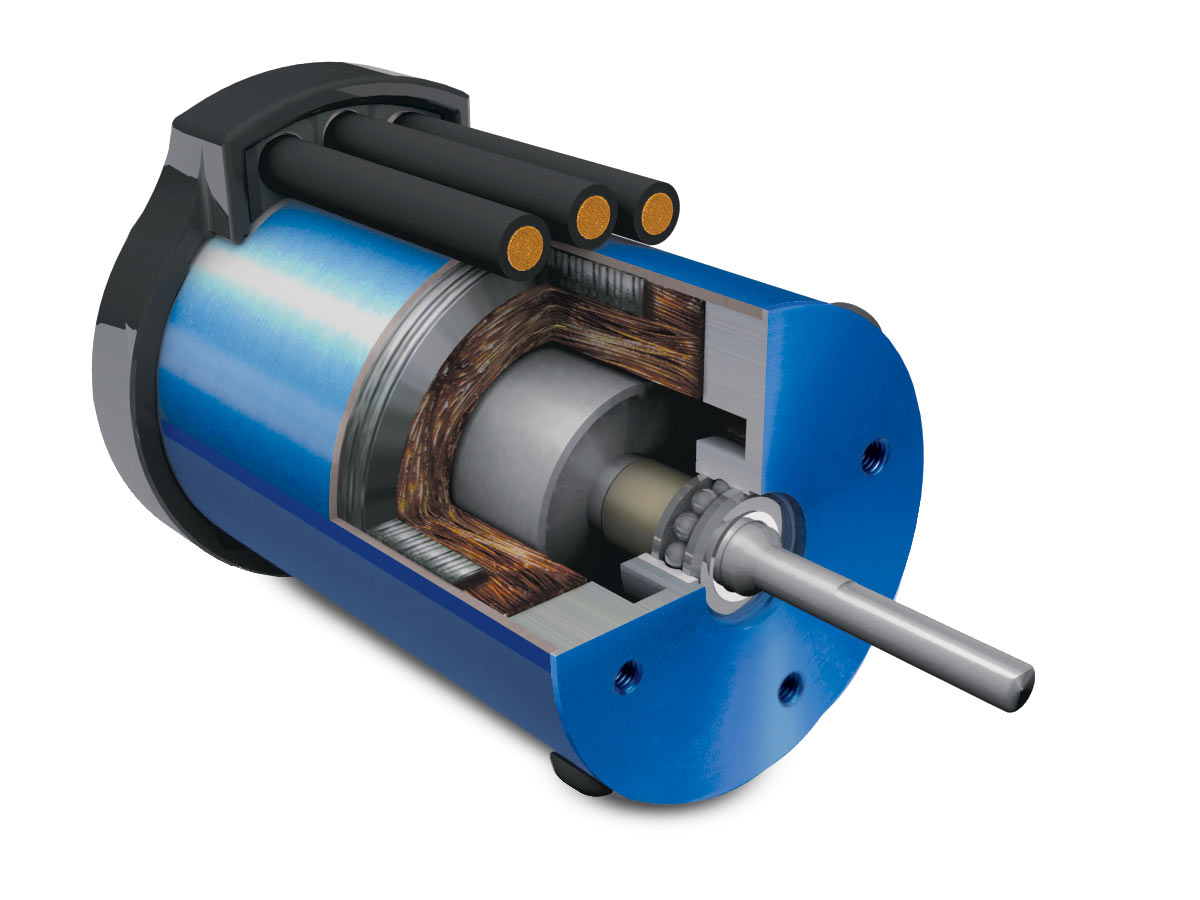
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.







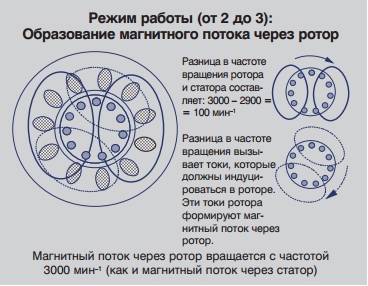
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
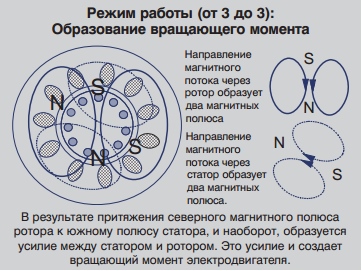
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

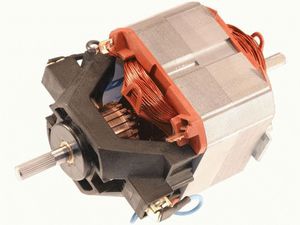
Универсальное коллекторное оборудование
Такой агрегат может работать на переменном и постоянном токе. Изготавливают его с последовательной обмоткой возбуждения при показателях мощности до 200 Вт. Статор выполняется из особой электротехнической стали. Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
То, как работает электродвигатель, зависит от его принадлежности к тому или иному типу оборудования. Модификации переменного тока с питанием от промышленной сети 50 Гц не дают получить частоту вращения больше 3000 оборотов в минуту. Вот почему для получения значительных частот используют коллекторный мотор электрического типа. Он к тому же легче и меньше по размерам, нежели устройства с переменными показателями с аналогичной мощностью.
В их отношении используют специальные передаточные механизмы, преобразующие кинематические параметры механизма до приемлемых. При использовании преобразователей частоты и при наличии сети повышенной частоты двигатели переменного тока легче и меньше коллекторных изделий.
Ресурс асинхронных моделей с переменными показателями значительно выше, нежели у коллекторных. Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Синхронный двигатель, у которого есть датчик положения ротора и инвертор, считается электронным аналогом коллекторного двигателя постоянного тока. Фактически он является коллекторным электродвигателем с последовательно включенными обмотками статора. Они идеально оптимизированы для работы с бытовой электросетью. Такую модель, независимо от полярности напряжения, можно вращать в одну сторону, так как последовательное соединение обмоток и ротора гарантирует смену полюсов из магнитных полей. Соответственно, результат остается направленным в одну сторону.
Статор из магнитного мягкого материала применим для работы на переменном токе. Это возможно, если сопротивление в перемагничивании у него незначительное. Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.









Примечательно, что для передвижения некоторыми видами бактерий используется электродвигатель из нескольких белковых молекул. Он способен трансформировать энергию электрического тока в форме движения протонов во вращении жгутика.
Синхронная модель возвратно-поступательного движения работает таким образом, что подвижная часть устройства оснащена постоянными магнитами. Они зафиксированы на шторке. Посредством неподвижных элементов постоянные магниты находятся под воздействием магнитного поля и проводят перемещение штока возвратно-поступательным методом.
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин; п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком. Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Основные типы электродвигателей
Существуют различные типы и модификации электрических двигателей, отличающихся типом питания, напряжением, пределом мощности, количеством оборотов в минуту. Они могут быть с фазным или с короткозамкнутым ротором. Эти показатели считаются основными, однако во многих случаях особое значение придается размерам и массе, а также энергетическим показателям.
Классификация основных типов электродвигателей выглядит следующим образом:
- Электродвигатели постоянного тока. Устанавливаются в электроприводах с возможностью регулировок, где требуются высокие эксплуатационные и динамические показатели. Они обеспечивают максимально равномерное вращение и обладают способностью к перезагрузке. Чаще всего устанавливаются на всех видах транспорта, работающих от электрического тока.
- Агрегаты переменного тока трёхфазные. Получили более широкое применение в сравнении с прочими устройствами. Они обладают более простой конструкцией, несложные в эксплуатации, надежны и дешевы в производстве. Представители этого типа двигателей используется практически во всей бытовой технике, а также в промышленности, сельском хозяйстве и других областях.
- Синхронный двигатель. Ротор совершает обороты с такой же самой частотой, какая имеется у магнитного поля, образованного в воздушной прослойке. Синхронные моторы функционируют на постоянной и стабильной скорости, поэтому они устанавливаются в вентиляционном и насосном оборудовании, компрессорных установках и генераторах, вырабатывающих постоянный ток.
- Асинхронный электродвигатель в том числе и с короткозамкнутым ротором. Вращение ротора и магнитного поля происходит с различными частотами. Их конструкция предусматривает использование фазного или короткозамкнутого ротора.
- Серводвигатели. Считаются наиболее высокотехнологичными устройствами, работающими на постоянном токе. В основе их функционирования лежат отрицательные обратные связи. Вращение вала регулируется через компьютер, а мощности вполне достаточно для развития нужной скорости.
- Электрические моторы шагового типа. Принцип действия состоит в преобразовании электронных импульсов в дискретное (прерывистое) движение. Нашли широкое применение в компьютерах и прочей оргтехнике. Несмотря на малые размеры, обладают высокой продуктивностью.
Особенности работы электромоторов постоянного тока
Основной действующий принцип работы электродвигателя постоянного тока состоит в следующих процессах. К обмотке возбуждения, называемой также индукторной обмоткой, осуществляется подача постоянного тока. В результате, создается постоянное магнитное поле, используемое для возбуждения. В моторах с использованием постоянных магнитов, создание поля происходит под их воздействием.
Поступление постоянного тока происходит и в якорную обмотку. Здесь он попадает под влияние магнитного поля, созданного статором, создавая момент вращения. В результате такого воздействия, ротор совершает поворот на 90 градусов, затем его обмотки вновь коммутируются и вращающиеся движения продолжаются.
Двигатели, работающие на постоянном токе классифицируются в соответствии со способом возбуждения:
- Независимое возбуждение. Обмотка возбуждения запитывается через независимый источник.
- Параллельное возбуждение. Обмотка возбуждения в этом случае включается одновременно с питанием якорной обмотки.
- Последовательное возбуждение. Включение обмотки возбуждения последовательно с якорной обмоткой.
- Возбуждение смешанного типа. Такие двигатели оборудуются параллельной и последовательной обмотками.
Устройство и принцип работы мотора постоянного тока зависит от многих факторов. Если подключение выполнено напрямую, то во время пуска якорный ток многократно превышает номинальное значение. Для выравнивания этих величин в цепь с якорем устанавливается пусковое сопротивление, выполненное в виде реостата. Плавность в время пуска обеспечивается ступенчатой конструкцией этого устройства. На первом этапе оказываются включены все ступени и сопротивление достигает максимального значения.





По мере того как двигатель разгоняется, возникает сила, противоположная ЭДС. Она постепенно возрастает, а якорный ток снижается за счет последовательного выключения ступеней. Подача электроэнергии на якорь и обмотки возбуждения может быть отрегулирована тиристорными преобразователями, известными как приводы постоянного тока.
Краткая история создания
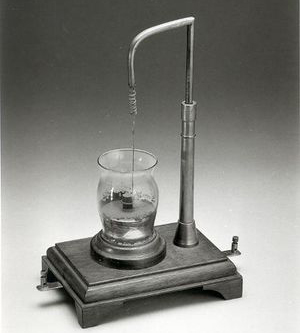 Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Работа трехфазного асинхронного двигателя
 Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Разность между частотой вращения ротора и магнитного поля статора выражается в виде скольжения. Двигатель именуют асинхронным, потому что частота вращения магнитного поля у него сообразна с частотой вращения ротора. Синхронный двигатель имеет отличия в конструкции. Ротор дополняется магнитом постоянного типа либо электромагнитом. В нём имеются элементы, такие как для запуска беличья клетка и постоянные магниты. Также их роль могут выполнять электромагниты.
 В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
 Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Синхронный принцип работы электродвигателя
Особенности синхронной работы моторов зависят от того, какой двигатель рассматривается. Они бывают:
- с катушками возбуждения;
- с постоянными магнитами (ПМ);
- реактивные;
- гистерезисные;
- шаговые.
Есть гибридные модели: реактивные с ПМ и реактивно-гистерезисные.
Независимо от того, какие двигатели рассматривать, условие синхронности базируется на взаимодействии МП полюсов индуктора (статора) и МП якоря.
К сведению. Если конструктивное строение обратить (расположить якорь и индуктор наоборот), то синхронный двигатель превращается в генератор.
Двигатель работает следующим образом: постоянный ток прикладывается к обмотке возбуждения (от внешнего источника питания), а переменный – к трёхфазной обмотке якоря. Якорная обмотка создаёт вращающееся МП, которое вступает во взаимосвязь с МП обмотки возбуждения. Результат – электромагнитный момент, вращающий ротор.
Асинхронные двигатели, особенности пуска
Асинхронные двигатели сегодня – это доля в 80% от всего количества разнообразных электродвигателей, выпускаемых мировой промышленностью. Все это – благодаря простоте конструкции, в эксплуатации и обслуживании, низкой себестоимости и высокой надежности. Но есть один существенный недостаток – из сети асинхронные двигатели потребляют реактивную составляющую мощности. Поэтому их предельная мощность напрямую зависит от мощности системы энергоснабжения. Кроме того, такой электропривод имеет значения пускового тока, которые в трое больше рабочих. При малой мощности системы энергоснабжения, это может вызвать значительное падение напряжение в сети и отключение других приборов. Асинхронные двигатели с фазным ротором, благодаря введению в цепь ротора пусковых реостатов, могут запускаться с небольшим пусковым током.







Резисторы, стоящие в цепи ротора, помогают ограничить ток не только в течении запуска, но так же и при торможении, реверсе и при снижении скорости. По мере того, как двигатель набирает скорость – разгоняется, чтобы поддерживать необходимое ускорение, резисторы выводятся. При окончании разгона и выхода на паспортную частоту, все резисторы шунтируются, двигатель переходит на работу со своей естественной механической характеристикой.
Рассмотрим пример запуска асинхронного двигателя с фазным ротором.
Рис. 3. Асинхронный двигатель с фазным ротором, схема запуска
Используя схему асинхронного двигателя (рис) рассмотрим запуск в две ступени который проводится с использованием релейно-контакторной аппаратуры. Одновременно напряжение подается как на силовые цепи, так и на управляющие – замыкается выключатель QF.
При подаче напряжения реле времени (обозначены КТ1 и КТ2) в цепи управления срабатывают, размыкая свои контакты. После нажатия кнопки запуска (SB1) срабатывает контактор КМ3 и запускается двигатель с резисторами, которые введены в цепь ротора – в этот момент на контакторах КМ1 и КМ2 питания нет. При подключении контактора КМЗ, из-за потери питания, в цепи контактора КМ1 реле КТ1 замыкает контакт через интервал времени, заданный задержкой времени в реле КТ1. По истечению времени (двигатель разгоняется, ток ротора начинает падать) происходит включение контактора КМ1 – происходит шунтирование первой пусковой ступени резисторов. Ток снова возрастает , но по мере разгона его значение начинает уменьшаться. Одновременно с этим в цепи происходит размыкание реле КТ2, оно теряет питание и с выставленной выдержкой происходит замыкание контакта в цепи контактора КМ2. Происходит шунтирование второй ступени резисторов, включенных в цепь ротора. Двигатель работает в штатном режиме.
Благодаря ограничению пускового тока, асинхронный двигатель с фазовым ротором можно устанавливать в слабых сетях.